Team description paper
The Essence of the Grey Region
Team Description Paper
Joshua Lei, Cristiano Afonso da Silva, Sebastien sin, Thomas Leong
Thomas Lao, Kinda Lam
Macau Puiching Middle School, No. 7, Avenida de Horta e Costa, Macau, China

“Now that we have control of our robot in every tiny factor, we can accomplish things we could never do before. ”
The essence of the grey region 2021
Abstract
This paper illustrates the research interest and the technical information of the essence team for the RoboCup@HOME 2021 Online Competition. The //name team has been representing the Future Life Application R&D center in the Macau Pui Ching Middle School FABLAB to participate in competitions related to science and technology since 2012. This paper includes the objectives and aims of the team which are presented with the hardware and software description. Navigation, carrying objects, follow me, voice recognition, fall detection, and a great storage area will be presented in the paper. Our team's aim has always been to build a multifunctional domestic robot. The new robot hardware and software design are presented in this paper.Introduction and Scientific Background
The essence of the grey region from The Future Life Application R&D Center has been working on various scientific projects at the Macau Pui Ching Middle School. This paper includes programming, engineering, and research. The project is developed by 2 teachers and 4 students at the age of 15 to 17 in the Fablab. Fablab is a place that provides technical tools and expertise for students to achieve their imagination and innovation. The team was founded in 2012, which initially uses STEM as the learning theme. After four years of hard work, the team was awarded for the top 10 innovative schools in China.
Team photo
Further explaining the life in FABLAB. Balancing schoolwork and leisure pursuits are the hardest things. During the entire process, the team members have read lots of books and maintained a positive inquiry spirit. Under the guidance of the teachers, the team members constantly try to courageously pick up new challenges and seriously improve and optimize their projects. During the year, the team keeps on organizing itself to participate in various competitions. The team participated in the "39th Beijing Youth Technology Innovation Competition"; "The 34th National Youth Technology Innovation Competition" and participated in "Aurora Cup"; "The CUHK Secondary School Students AI Competition 2019", etc. Furthermore, the team has taken part in the robocup@HOME education for two years, 2019 and 2020 respectively, and we have been honored with two world championships in the junior category. This year, we want to climb up to the next level and compete in the open category.

The team participating in the Macau CTM contest
Research Objectives and Goals
From the team perspective, the hardware of the robot is somewhat a “carrier” that carries the program to play different roles in society. To build a professional domestic robot, the requirements of technological basics and programming are indispensable. For years, the team had been using the robot named turtlebot2 to achieve different tasks. Building an elderly robot is the idea of the team last year. This year, our aim is to build a domestic robot that operates in restaurants.In the restaurant environment. Firstly, the robot will greet the newly arrived customers and ask them the basic information, such as “have you made your booking”, “what’s your name”, “how many of you”. After receiving the information with voice recognition, the robot will analyze the information and bring the customers to their seats. The menus are then brought to their table, and the robot will wait for further orders. If the robot is called by its name, it will arrive at the person’s seat and take the order. Minutes later, the robot will bring the dishes to the table. The process diagram below will further explain the procedure of the mission:

Process diagram
Hardware design
This year, we made a brand new robot. Our team did not just build the entire robot from scratch, we have also launched and installed ROS by ourselves.We have free ourselves from the fixed structure from the previous robot. Before building our robot, we used Solidworks to draw out the design of it. We have made various versions and we rounded up with this design. Our team built the new robot using 3D printed joints, plastic boards, aluminum channels, etc.
3D CAD diagram
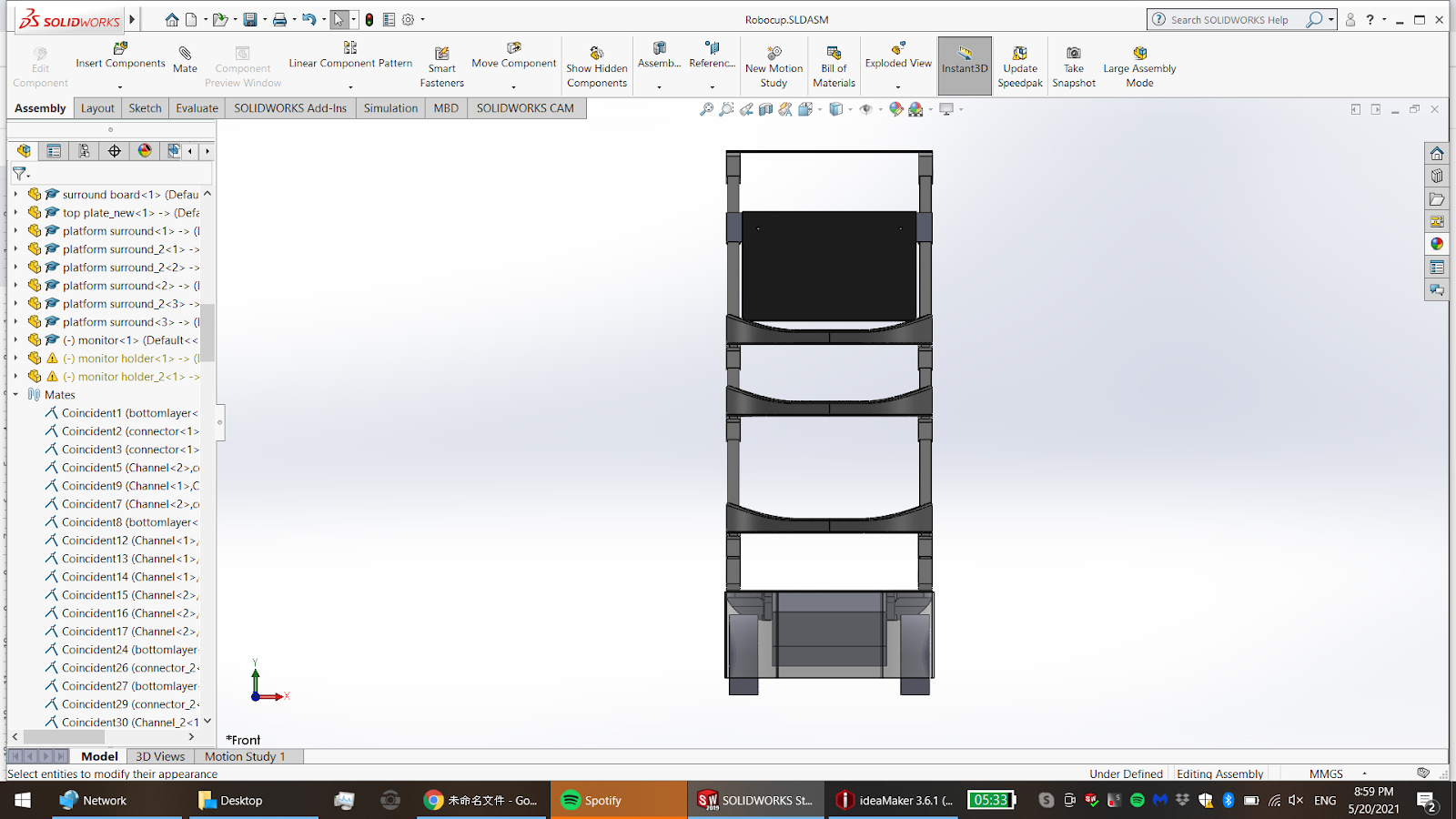


Front view 3rd person view side view
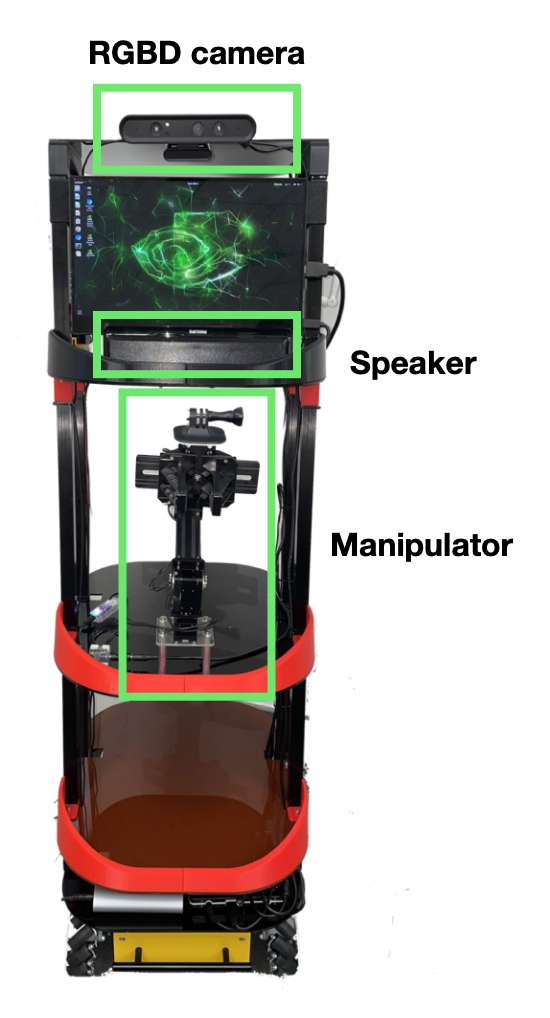
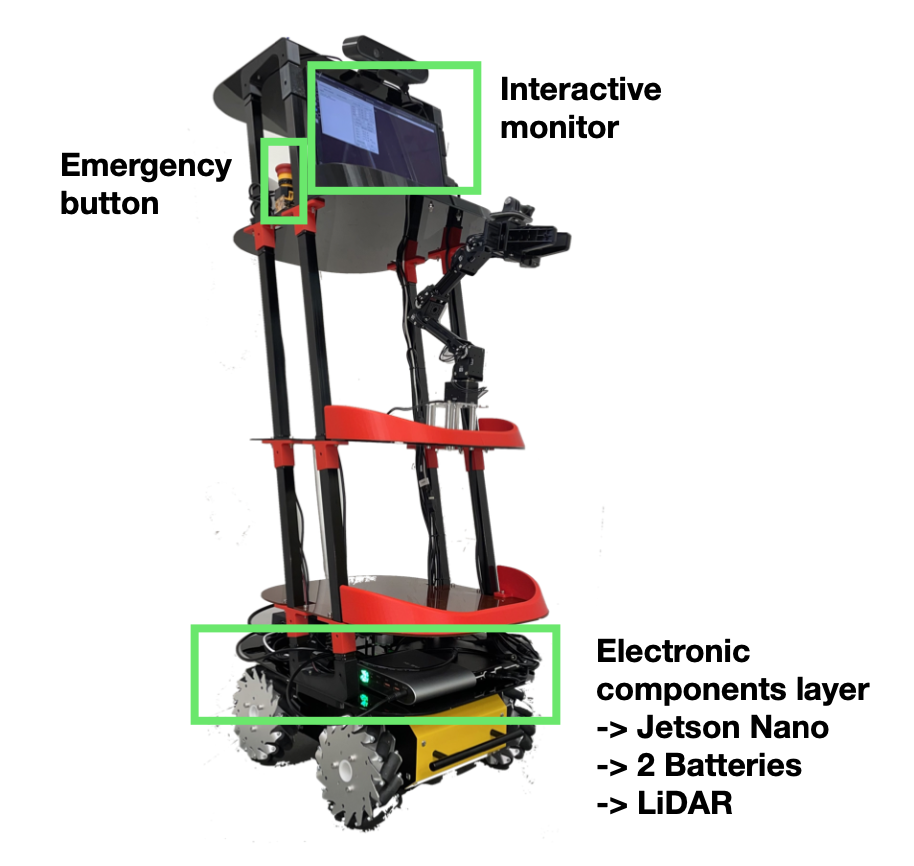
Robot structure diagram

System circuit diagram

Software design
SLAM Navigation
SLAM and AMCL are the two most crucial components in robot development. As we used a new chassis and installed our own ROS system, we first used simulation to test our AMCL system. After the simulation testing. We control the robot to move around the environment and use its depth camera to scan it. After scanning, a map is generated, with our post-production, the map is transformed into a neat 2D map. Afterward, we used AMCL to move our robot from point A to B in a 2D map, our robot can identify its origin by scanning the environment around it. According to the similarity of the map and the real-time surroundings, our robot can path its way from point A to B. It can also path a new route instantly if there is an object blocking its way.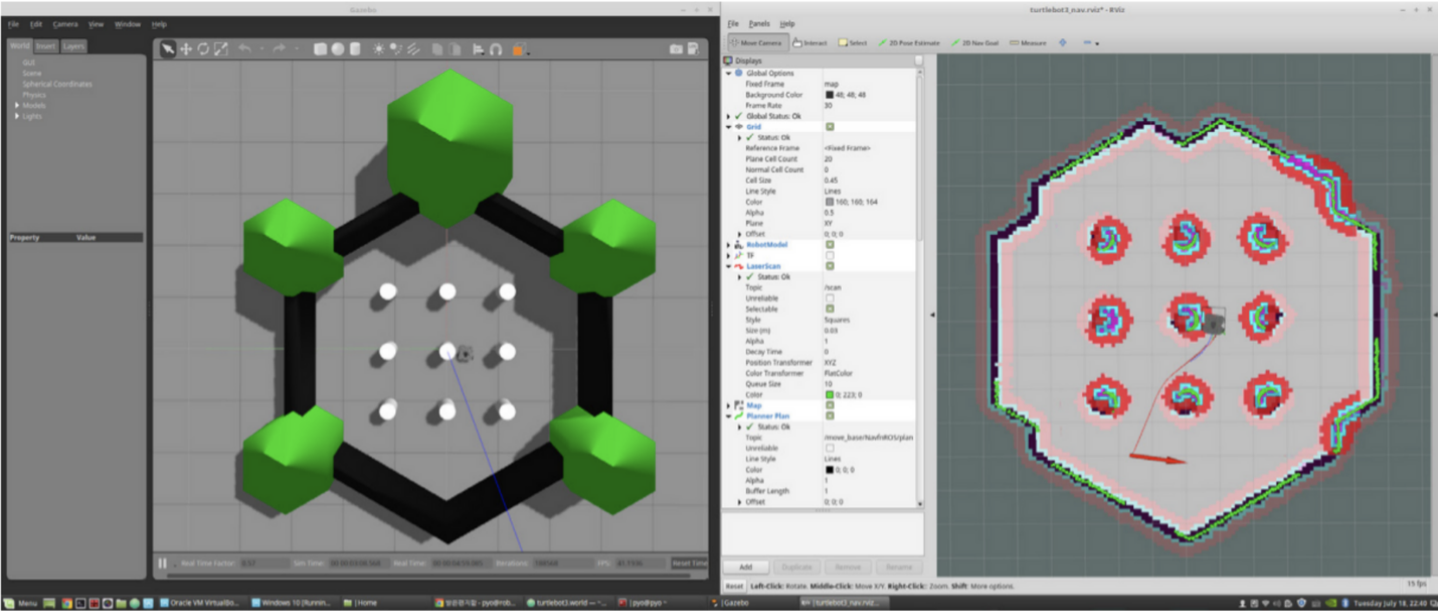
SLAM AMCL navigation simulation
Follow Me
Follow me is a function that requires the robot to follow a person constantly beside the environmental factors. Last year, we have already achieved this function using depth and color detecting methods to follow the people in front of the robot. However, it ends up imprecisely, so we decided to mitigate it. The two main problems deduced from last year are robot following doors corner and robot following the wrong person. This year, after doing lots of research, we have found a suitable model for our project, OpenVino.It can track the right person according to its vector similarity between two photos at 0.01 seconds time intervals. As such, we can still detect the right person if someone walks across the camera and prevents tracking the object with a shorter distance.This year, we implanted this function to our new chassis and programmed a new PID on the chassis.


Follow me on our new chassis
Function
We have four main functions and they can be separated into several parts: carrying objects, objection recognition, voice recognition, and great storage area.
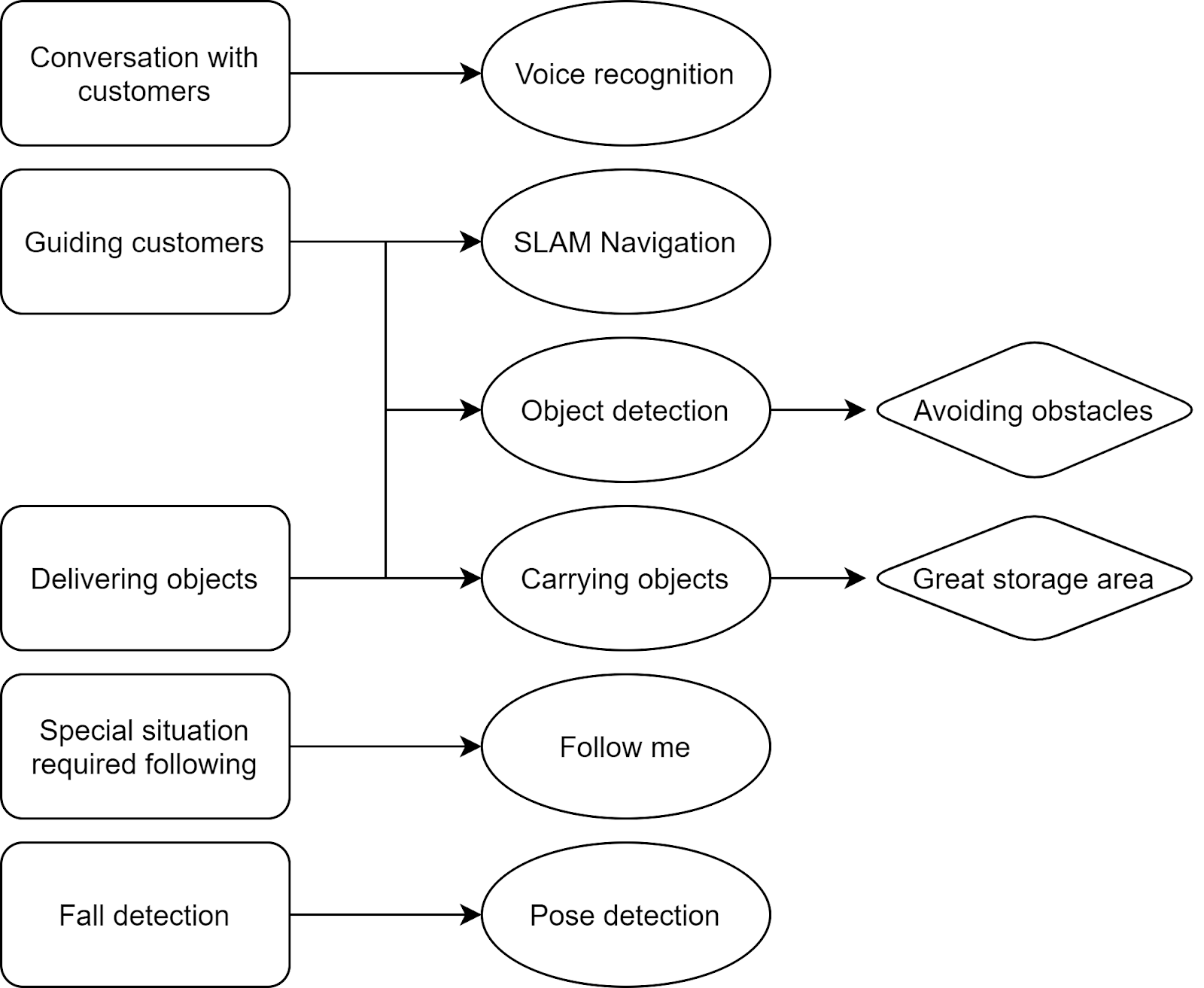
Procedure linked functions diagram
Carrying Objects
Carrying objects is mainly presented with two main functions, locating the object and grabbing the object. Firstly, the team used object detection in YOLO to detect the object (e.g. bottle) and record the depth with an RGBD camera. After collecting the datas, we can calculate the x-axis value, y-axis value, and z-axis value using proportion calculation. Eventually, we control each servo to grab the object and deliver it to other places. This function requires precise controls so we need lots of refinements to accomplish this effect. In our theme, This function is used to carry drinks to the customers in a restaurant
 RGB-D Camera with manipulator calculation
RGB-D Camera with manipulator calculationObject Recognition
One of the main functions of the RGBD camera is to detect objects (e.g. furniture, obstacles). After getting the source image in the camera, it is sent to our server and YOLO is used to recognise the objects. This showcase is for showing the capability of our robot. In the near future we will train a model with objects we would see in a restaurant (e.g. plates, waiters, waitresses, charis, couches, tables) and we can use it with SLAM to precisely locate its direction.

Object detection testing
Voice recognition
One of the main functions of the RGBD camera is to detect objects (e.g. furniture, obstacles). After getting the source image in the camera, it is sent to our server and YOLO is used to recognise the objects. This showcase is for showing the capability of our robot. In the near future we will train a model with objects we would see in a restaurant (e.g. plates, waiters, waitresses, charis, couches, tables) and we can use it with SLAM to precisely locate its direction.

Voice recognition test with cute facial expression from Robi
Storage area
As we have added more layers on the robot, it can carry two backpacks on the bottom layer. Fast food bags, drinks can also be carried on other layers of the robot.

Great storage area
Conclusion
Certainly, this year is the hardest year for us. As the COVid-19 pandemic continues to spread out in Macau, we seldom have time to meet each other, so the time for collaboration is little. However, we didn’t back down in the face of adversity, instead, we continue to build new, innovative functions this year. Not just adding new functions, but also rebuilding the whole robot. The aim of our team has always been to spread ROS, Robocup, and home robots to more students and we will continue to bring this on in the future.







Comments
Post a Comment